Инновационные методы обучения программированию будущих учителей информатики
Материал представляет собой перевод статьи Janka Majherová, Václav Králík. Кафедра информатики, факультета образования, католического университета в Ружомбероке, Словакия. Европейский журнал современного образования, 2017, 6 (3)
В процессе подготовки будущих учителей информатики студенты получают опыт работы с различными методами программирования. Также, студенты знакомятся с программированием с помощью роботизированной системы Lego Mindstorms. Однако недостаточное количество доступных систем Lego является ограничивающим фактором для учебного процесса. Использование виртуальных роботизированных сред представляется наиболее подходящей альтернативой для работы с недостаточным количеством аппаратных средств. Разработанные программы создаются и тестируются в виртуальной лаборатории и могут быть впоследствии реализованы в реальную модель робота. В таких случаях обучение не зависит от количества аппаратных комплектов и форма обучения может быть использована как в группах, так и индивидуально. В статье описывается наш опыт обучения студентов с роботизированной системой Lego Mindstorms, средами программирования Bricx и виртуальной образовательной средой ROBOTC. Одним из способов сделать обучение языку программирования привлекательным является использование роботизированных комплектов и виртуальных сред в классе.
Материал подготовил:
Родин Александр Ильич,
Старший методист РНМЦ НО
ГБПОУ “Воробьевы горы”
к.э.н.
Введение
В современной системе образования происходят заметные изменения по модернизации образовательного процесса. Учителя все больше заинтересованы в продолжении своего образования и реализации проектов с использованием цифровых технологий. Школы модернизируют учебные классы с использованием современного учебного оборудования (технологии), чтобы учителя могли осуществлять поддержку цифровых технологий для преподавания различных дисциплин. Использование взаимодействия технологий позволяет проводить исследования во всех дисциплинах и на всех уровнях образования. Однако одних только технологий недостаточно. Необходим качественный цифровой контент, который в настоящее время доступен, в частности, через Интернет.
Важным компонентом цифровой грамотности подрастающего поколения является способность понимать информацию и использовать ее в различных форматах из источников представленных цифровых технологий. Согласно исследованию, проведенному Институтом государственных дел (Velšic, 2013), среднее значение индекса цифровой грамотности в Словакии увеличилось с 0,33 пункта (по шкале с 0 до 1) в 2005 году до 0,47 пункта в 2013 году. Исследование показывает, что школы оказывают наибольшее влияние на повышение цифровой грамотности. В ходе этого исследования выяснилось, что молодые люди Словакии добились примерно на 60 процентов более высоких результатов, чем в среднем по населению, и за последнее десятилетие они улучшили свои навыки и способности в широко распространенной категории цифровых технологий. На 50 процентов улучшилась способность работать с такими аппаратными и периферийными устройствами, как компьютеры, планшеты, смартфоны, сканеры, принтеры и портативные носители. С другой стороны, наблюдается медленный рост способности работать с программным обеспечением (редактирование текста, таблиц и графики, мультимедиа и веб-браузеров).
Исследование электронных навыков для рынка труда в Словакии показало, что молодое поколение по-прежнему испытывает недостаток во многих навыках и способностях в цифровых технологиях (Velšic et al., 2016). Среди респондентов в возрасте от 18 до 26 лет лишь 14% утверждали, что у них ничего нет в этом отношении. Пятьдесят семь процентов молодых людей заявили, что у них нет таких навыков, как прикладное программирование, проектирование систем, разработка веб-сайтов и мультимедиа. Эта проблема тесно связана с недостаточной подготовкой к решению проблем и неадекватным развитием алгоритмического и логического мышления, о чем сообщили остальные 42 процента респондентов.
Поэтому мы ориентируемся на подготовку будущих учителей, а также практикующих учителей в программах непрерывного образования, для работы с новыми разработками в современных цифровых технологиях. Расширение целей обучения до цифрового измерения с соответствующим использованием ИКТ повышает эффективность обучения (Nagyová, 2015; Hubwieser et al., 2015; Jacková, 2008).
В целях содействия дальнейшей и эффективной интеграции цифровых технологий и повышения качества процессов обучения мы можем изучить и рассмотреть потенциальные пути поощрения и стимулирования инноваций. Использование обучающих роботизированных наборов стимулирует и мотивирует студентов. Мотивация в данной форме обучения основана на методе, при котором студенты по собственным предложениям используют комплекты для создания устройства (робота, транспортного средства и др.). Они программируют определенные функции, процедуры, поведение или действия, которые должны выполняться устройством. Такая взаимосвязь программного и аппаратного обеспечения показывает, как знание языка программирования может быть применено на практике (в таких областях, как автоматизация и управление процессами). Цена учебных роботизированных комплектов является тем фактором, который определяет количество таких комплектов в школах. Решением может быть использование виртуальных лабораторий, которые могут имитировать аппаратное устройство и реальную среду.
Обучение программированию в реальных и виртуальных средах
Преподавание языка программирования в средней школе имеет особенности, которые определяются многими факторами. Одним из факторов, влияющих на обучение, является сложность языка. Это момент, чтобы спросить себя: когда лучшее время, чтобы начать преподавать программирование и какой язык больше подходит для конкретной возрастной группы студентов? Нашим требованием для языкового отбора было содействие непрерывному образованию студентов с учетом интеллектуального развития учащихся в рамках среднего школьного образования, а также возможность объединения использования этих программных ресурсов как для нижнего, так и для верхнего уровней образования.
Интерактивные среды для обучения программированию усиливают роль визуализации. По словам Мусы и соавторов (2015), визуализация в образовательной среде может обеспечить простой и эффективный подход к получению результатов, решению проблем и открытию структуры модели в процессе обучения студентов новой информации. Визуализация отношений и логических связей в рамках единой модели позволяет поддерживать цифровые и базовые компетенции студентов в области науки и техники. Моделирование на уроках информатики – это не только инструмент, но и сам предмет образования, когда студенты на основе полученных знаний и с помощью цифровых инструментов, создают модель части реального мира (Majherová, 2007; Gunčaga и соавт., 2015).
Образовательные роботизированные системы предлагают несколько возможностей для обучения программированию. По словам Saleiro и др. (2013) и Benedettelli (2014), набор роботизированной системы Mindstorms LEGO оказался наиболее подходящим инструментом. В дополнение к различным аппаратным аксессуарам, он содержит базовое программное обеспечение, которое позволяет обучать программированию школьников в возрасте от 8 лет. Среда разработки и программирования NXT-G является наиболее популярным типом. Студенты непосредственно не сталкиваются с синтаксисом языка, но среда позволяет студентам создавать алгоритм для простой программы (Рис. 1).

Рис 1. Окружающая среда Lego Mindstorms NXT
Используя Lego Mindstorms на более высоком уровне среднего школьного образования, можно работать в среде программирования Bricx Command Center (Bricx, 2016), которая поддерживает несколько языков программирования. Преимущество этого метода обучения заключается в том, что студент, который смог создать программу на культовом языке и понял функцию знаковых команд, может работать с набором equal building kit на языке Cи (Рис. 2). Визуальное соединение брендов с иконками в NXT-G и команды Bricx позволяет студенту усваивать графическую информацию о связи между теоретическим оформлением решаемой задачи и значками команд.
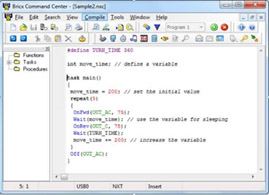
Рис. 2. Набор equal building kit на языке Cи.
Для программирования микроконтроллеров рекомендуется сделать структуру языка программирования максимально схожей с языком программирования, используемым при разработке программных приложений на платформах ПК. Язык Си содержит библиотеки для программирования датчиков и компилятор, который преобразует программу в язык данного типа микроконтроллера. Для обучения программированию мы можем использовать язык программирования ROBOTC (ROBOTC, 2016). Этот язык предназначен для написания и отладки программ, а на уровне программного обеспечения он предлагает комплексный компилятор (отладчик в реальном времени).
Liu и соавторы (2013a), провели эксперименты с ROBOTC и среды виртуальных миров робота (RVW). Они хотели проверить, как RVW может быть использован для обучения начинающих навыкам программирования. Студенты использовали сочетание моделирования настольных ПК RVW и среды программирования Palm Island для изучения базового программирования. Один класс закончил курс программирования ROBOTC, используя физические VEX роботов (очный класс), в то время как другой класс закончил курс программирования ROBOTC, используя виртуальные VEX роботов (виртуальный класс).
По словам Liu и соавторов (2013b), очный класс и виртуальный класс показали равный выигрыш в обучении. Тип обучения не отличался между двумя классами, о чем свидетельствует равный результат в обучении. Виртуальный класс показал преимущество сокращения времени, поскольку они закончили курс раньше, чем очный класс, без влияния на их общее обучение. Это говорит о том, что работа с виртуальными роботами позволила студентам учиться более эффективно в этом контексте, по сравнению с работой с физическими роботами. Студентам в очном классе приходилось иметь дело с ежедневной сборкой робота, дополнительными механическими проблемами и разборкой, необходимой при работе с физическим роботом. Следовательно, учитель провел больше времени в физическом классе, помогая студентам в решении организационных вопросов класса. В виртуальном классе учитель и его ученики смогли посвятить все свое время обучению программированию.
Опыт
Мы искали инструменты для поддержки обучения программированию роботов для студентов бакалавриата, которые специализируются на преподавании компьютерных наук. Студенты имеют возможность ознакомиться с этой технологией и способами ее преподавания, а также применить свои знания в своей педагогической практике после окончания университета (Кралик, Майхерова, 2016).
Содержание курса программирования роботов адаптировано к этой цели (табл. 1). Курс проходит в компьютерной лаборатории. Во время введения студенты познакомятся с историей разработки роботизированных наборов от Lego, а также от других производителей. Они познакомятся с программными средствами (языками), используемыми для программирования.
Таблица 1. Содержание курса Программирование робота
|
Тематическое направление |
Количество часов Очная/ заочная форма |
Цели |
| Роботизированные комплекты, программные средства | 2/1 | Введение в робота
программирование |
| В NXT-G и окружающей среды | 4/2 | для решения основных задач программирования |
| Среда программирования Bricx | 6/1 | для решения основных задач программирования |
| Сборка робота | 4/1 | построить робота |
| ROBOTC язык RVW виртуальная лаборатория | 4/2 | использование виртуальной среды для программирования роботов |
| Учебники и инструкции | 4/1 | использование учебников |
Студенты постепенно обучаются в среде программирования NXT-G с последующим переходом на более высокий уровень языка программирования в среде разработки Bricx. Студенты делятся на группы и программируют робота, построенного из набора LEGO Mindstorms. В этой части курса студенты познакомятся с общими требованиями виртуальных лабораторий, а также с возможностью использования виртуальных лабораторий в преподавании языков программирования. В практической части курса они познакомятся с языком ROBOTC и виртуальной лабораторией RVW. С точки зрения учителя, очень важно мотивировать студентов к обучению программированию. Для обеспечения этой мотивации могут быть рассмотрены игры и соревнования. Таким образом, учащиеся получают информацию о масштабах и правил национальных и международных соревнований по программированию роботов, например, Первой лиги Лего (FLL, 2016) или Istrobot (2016).
Последняя часть курса программирования роботов ориентирована на работу с учебниками и инструкциями. Будущие преподаватели ознакомятся с видеоинструкциями по поддержке обучения от Lego и бесплатными инструкциями в интернете. Студенты приобретают методику обучения и рабочие практики по программированию роботов с помощью различных учебных пособий.
Экспериментальная часть
Эксперимент длился один учебный год 2015/2016 и в нем приняли участие 13 участников. Студенты были разделены на две группы: группа студентов очной формы обучения (8 студентов) и группа иностранных студентов (5 студентов). Мы попытались сравнить два подхода к обучению программированию роботов. В очной форме обучения мы обучали программированию с использованием физической модели робота и языка программирования NXT-G, а также среды программирования Bricx Command Center. В дистанционном курсе мы использовали виртуальную роботизированную среду RVW, а также программу ROBOTC (Таблица 2). Мы постарались исследовать последовательность ключевых задач курса от простых до сложных: от простого иконочного языка программирования до программирования виртуального робота.
Таблица 2. Методы программирования робота
|
|
Очная форма |
Заочная форма |
| аппаратура | физическая модель робота | виртуальная роботизированная среда |
| программное обеспечение | NXT-G Bricx Command Center | Программа ROBOTC |
Для сравнения двух подходов мы использовали робота, построенного по инструкции, обозначенной как “база”. Этот робот имеет шасси с двумя двигателями и одним опорным колесом, и поэтому мы имеем дело с дифференциальным управлением. Основные датчики из комплекта Lego Mindstorms размещены на роботе: сенсорный датчик, датчик света, ультразвуковой датчик и микрофон. Этот робот может быть построен из блока NXT или EV3 Lego kits (Рис. 3). Для экспериментов в процессе обучения программированию используются алгоритмы управления дифференциальным редуктором.

Рис. 3. Лего робот “база ” (учебник NXT-G)
В контексте обучения программированию роботов в физических средах мы используем различные типы задач для студентов. Целью проекта является составление программы, которая использует автоматическое управление движениями робота на основе значений, измеренных датчиками. В этой задаче два датчика используется для управления движением робота. Первый датчик считает обороты двигателя, второй датчик обеспечивает измерение расстояния.
Задача А: робот с ультразвуковым датчиком
Построить робота, который может двигаться вперед и останавливаться в соответствии с расстоянием, измеряемым ультразвуковым датчиком. Прикрепите ультразвуковой датчик к роботу, который указывает вперед. Напишите программу, которая заставляет робота двигаться к стене, а затем повернуть назад, чтобы он остановился на том же месте, где он начал.
Важное примечание: программа должна функционировать должным образом независимо от расстояния робота от стены. Расстояние робота от стены измеряется как переменная. Правильное решение в программа NXT-G и окружающей среды показана на рис. 4.
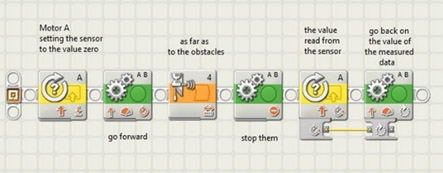
Рис. 4. Правильное решение задачи
Задача B: подсчет строк
Для этой задачи мы используем уже созданное шасси от робота в задаче А к шасси, которое может двинуть вперед и имеет ультразвуковой датчик, который позволяет измерять расстояние, прикрепляем датчик света. Его расположение важно. Измерительная часть датчика должна показывать вниз. Расстояние между измерительной частью и площадкой должно быть до 0,5 см выше площадки.
Создайте поверхность с линиями согласно рис. 5, в белой части измерьте значения для белого и черного цветов с помощью меню “вид” в панели программы NXT-G и запишите их.
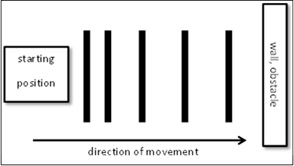
Рис. 5. Нанесение площади
Напишите программу, в которой робот движется вперед, при каждом пересечении черной линии робот должен подавать звуковой сигнал, а когда дело доходит до стены, он должен остановиться. Модифицируйте программу так, чтобы после остановки она свистела столько раз, сколько пересеченных черных линий она записала.

Рис. 6. Решение задачи B
Решение задач A и B (Рис. 4 и 6) легче найти в графической среде. Для обучения программированию важно понимать, с помощью какого алгоритма можно решить конкретную задачу и через какую последовательность команд. Среда NXT-G является графической и облегчает понимание решения. Если задание выполнено таким образом, его можно запрограммировать на языке программирования более высокого уровня в среде Bricx Command Center. Для обучения программированию мы используем сочетание среды разработки NXT-G и языка программирования более высокого уровня. Преимуществами данного подхода являются визуализация последовательности действий и графическое отображение работы с переменными в программе. В конечном счете, это может привести к эффективному пониманию работы с языком программирования более высокого уровня и более быстрому пониманию поставленной задачи.
Для второго подхода к обучению программированию роботов мы использовали язык программирования ROBOTC и виртуальную роботизированную лабораторию. ROBOTC, язык программирования более высокого уровня, является производным от языка C++, имеет онлайн-компилятор и способность передавать созданную программу роботу.
Большим преимуществом программы ROBOTC является ее связь с виртуальной средой. Виртуальная модель робота идентична реальному роботу, называемому BASE. Визуализация движения и взаимодействия робота в виртуальной лаборатории осуществляется по разработанным студентами программам управления. Визуализация движения происходит в 3D-среде и взаимодействия между роботом и его окружения можно наблюдать с разных ракурсов.
Преимущество этого способа обучения заключается в том, что нам не нужна физическая модель робота, потому что проверка корректной работы программы осуществляется с помощью 3D-модели робота в виртуальной среде (Рис. 7).
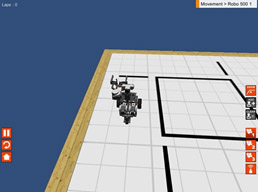
Рис. 7. Виртуальная среда ROBOTC
Программирование в виртуальной среде разделено на несколько отдельных частей, которые ориентированы на движения робота, программирование датчиков робота и работу с переменными, а также на управление роботом. В каждой части виртуальной среды были подготовлены различные задачи программирования. Правильная последовательность алгоритма всегда может определяться взаимодействием между виртуальным роботом и виртуальной средой. Студенты получили наглядную информацию о выполнении задания.
Результаты
Студенты по очной форме обучения работали только с физическими наборами Lego Mindstorms в среде NXT-G или Bricx в классе 2 часа в неделю. Заочные студенты работали с физическими моделями роботов в классе от 4 до 6 часов, а также проводили самостоятельное обучение за пределами класса с использованием виртуальной среды. В эксперименте были проверены два подхода к обучению программированию моделей роботов при подготовке будущих учителей информатики. Мы рассмотрели их преимущества и недостатки. В каждой группе студентов проводили оценку результатов на основе наблюдений и использования анкет.
В курсе программирования роботов мы работали с 8 студентами очной формы обучения и 5 заочными студентами. В конце курса студенты заполнили форму со следующими вопросами:
- В какой среде программирования вы знаете, как работать?
- Вы уже запрограммировали робота?
- Вы работали с реальной моделью робота во время курса?
- Вы использовали комплект Lego Mindstorms во время прохождения курса?
- Вы работали в виртуальной среде во время курса?
- Как вы оцениваете свое мастерство в создании программы для робота?
- Как вы оцениваете свое мастерство в создании модели робота?
- Как вы оцениваете свое мастерство в работе в виртуальной среде?
(1 – нет навыка, 5 – отличное умение)
Последний вопрос был открытым: оцените преимущества работы в виртуальной среде по сравнению с реальной средой для программирования моделей роботов.
До этого курса все студенты работали на языках Pascal и Cи. Они столкнулись с программированием роботов, в основном, в колледже. Только 5 студентов сообщили об опыте работы с роботами в средней школе.
Студенты дневной формы обучения должны были разделить учебное время, предусмотренное для данного предмета, на две части. Первая часть касалась построения физической модели робота, а вторая была посвящена созданию программы. В большинстве случаев студенты сосредоточились на построении робота, чем на создании программы. Студенты очной формы обучения оценили свои навыки программирования робота со средним баллом 3,4 (График 1). Навыки создания моделей роботов оценивались со средним баллом 4.5 (График 2).
Заочные студенты, с более коротким сроком обучения по предмету, имели меньше возможностей для работы с физическими моделями, поэтому больший акцент был сделан на работу в виртуальной среде. Они оценили свои навыки в построении модели робота со средним баллом 3.3 (График 2). Но навыки программирования робота оказались выше, со средним баллом 3,75 (График 1).

График 1. Навыки создания программы моделей роботов (1 – нет навыков, 5 – отличное умение)

График 2. Навыки создания модели робота (1-нет навыков, 5-отличное умение)
В анкете мы спросили студентов, какие они видят преимущества работы с моделью робота в виртуальной среде по сравнению с физической моделью. Вот примеры их ответов:
“…в виртуальной среде, мы можем имитировать движение робота, прежде чем ввести его в действие в реальной среде. Работа в виртуальной среде эффективна по времени и более прибыльна в финансовом отношении”
“…происходит снижение затрат, связанных с производством роботов, есть также бесплатный доступ в виртуальную лабораторию (в любое время и в любом месте), нет риска получения травм, виртуальная среда обеспечивает диагностику исходного кода, который контролирует тот или иной источник или комбинацию источников, имитирует различные альтернативы, есть совместимость с широким спектром языков программирования”
“…у нас есть возможность участвовать в робототехнических упражнениях без прямого доступа к роботу, доступна автоматическая онлайн-коррекция ошибок при работе с роботами в виртуальной среде”
“… новые навыки в области программирования”
“…виртуальная среда проще и занимает меньше времени, каждый может работать самостоятельно, может работать дома через сеть в любое выбранное время”
Обсуждение и заключение
Из анализа результатов обучения можно сделать несколько выводов о преимуществах и недостатках использования физических и виртуальных подходов к программированию роботов.
Если мы используем метод, состоящий из комбинации среды NXT-G, языка программирования более высокого уровня и реального робота, мы наблюдаем отличную видимость последовательности команд для построения программы. Это связано с тем, что в среде программирования NXT-G результаты создаются с помощью иконок. Этот метод подходит для простого управления движением робота. В более сложной программе количество команд увеличивается, и они занимают место в виде значков на экране. В какой-то момент, если программа становится слишком сложной, преимущество хорошей видимости теряется. Проверка правильной работы программы выполняется на физической модели робота в реальных условиях. Мы рассматриваем этот метод обучения программированию как трудоемкий, поскольку перед его применением в образовательной практике необходимо создавать и проверять задачи.
Обучение с помощью наборов LEGO Mindstorms мотивирует студентов, благодаря их взаимодействию с роботом, который они должны построить. Однако нас также беспокоит ситуация, в которой механическое строительство робота занимает большую часть учебного времени по сравнению с временем, позволенным для создания программы. Тот факт, что комплекты требуют регулярного технического обслуживания, а также занимают место для хранения после окончания курса, может считаться недостатком.
Мы видим преимущества в методе обучения программированию с использованием виртуальной среды, поскольку она обеспечивает замену физического комплекта. Использование среды программирования интуитивно понятно. Виртуальная доска, на которой движется робот, является стандартной для всех экспериментов, параметры не меняются. Вид виртуальной платы можно переключать между различными внешними видами. Студенты учатся программировать виртуального робота, как если бы у них был физический робот, собранный из комплекта. Программирование осуществляется на языке программирования более высокого уровня. Программа, созданная студентами, может быть отправлена учителю в виде текстового файла.
Среда программирования виртуального мира робота поддерживает только Язык Cи. С этой точки зрения программа кажется неподходящей для использования в классах k4 – K6. Мы считаем, что это программное обеспечение подходит для более высоких классов: от K7 до K12. Виртуальная среда позволяет студентам полностью сосредоточиться на задачах, связанных с программированием. Ошибки, вызванные неисправными частями робота (датчики, батареи и др.), избегаются. Помимо прямого обучения, этот метод можно использовать для дистанционного обучения или для других форм обучения. Виртуальная среда – это программное обеспечение, которое полностью заменяет Lego kit.
В наших будущих исследованиях мы рассмотрим программирование роботизированных комплектов, связанных Lego с модулем Arduino и Raspberry. По словам Polсin и др. (2016), Snajder и Gunis (2016), при подготовке будущих учителей информатики важно внедрять новые знания, методы и формы в рамках преподавания языков программирования таким образом, чтобы обучение было привлекательным и было взаимосвязано с результатами применения.
Выражение благодарности
Работа выполнена при поддержке научного Гранта KEGA 009KU-4/2017 инновационные методы в преподавании информатики в средней школе и интерактивных электронных учебных материалов для поддержки внедрения современных технологий в преподавании математики и информатики.
Ссылки
Benedettelli, 2014 – Benedettelli, D. (2014). The Lego Mindstorms EV3 Laboratory. San Francisco: No Starch Press. Retrieved from http://robotics.benedettelli.com/publications
Bricx – Bricx Command Centre. Retrieved from http://bricxcc.sourceforge.net/ Firstlegoleague – URL: http://www.firstlegoleague.org/
Gunčaga et al., 2015 – Gunčaga, J., Janiga, R. and Žilková, K. (2015). Supporting of simulation and visualization through ICT in the educational process. Information and Communication Technology in Education 2015. pp. 25-33. Ostrava: University of Ostrava.
Hubwieser et al., 2015 – Hubwieser P., Giannakos M. N., Berges M., Brinda Torsten, Diethelm I., Magenheim J., Pal Yogendra, Jacková J. and Jasute E. (2015). A global snapshot of computer science education in K-12 schools. In: ITiCSE-WGP’ 15: proceedings of the 2015 ITiCSE on Working Group Reports, July 4–8, 2015, Vilnius, Lithuania. New York: ACM, 2015. pp. 65-83.
Jacková, 2008 – Jacková, J. (2008). Learning for Mastery in an Introductory Programming Course. In ITICSE ’08 Proceedings of the 13th annual conference on Innovation and technology in computer science education. pp. 352-352. New York: ACM.
Králík, Majherová, 2016 – Králík, V. and Majherová, J. (2016). Virtual Robotic Laboratories Robot C in the Informatics Teachers Training. In DidMatTech 2016. Budapest: Eötvös Loránd University.
Liu et al., 2013 – Liu, A., Newsom, J., Schunn, Ch. and Shoop, R. (2013). Students Learn Programming Faster Through Robotic Simulation. Techdirections. Vol. 72, n.8.
Liu et al., 2013a – Liu, A.S., Schunn, Ch., Flot, J. and Shoop, R. (2013). The role of physicality in rich programming environments. Computer Science Education. Retrieved from http://education.rec.ri.cmu.edu/educators/research/
Majherová, 2007 – Majherová, J. (2007). Virtual plants in high school informatics – L- systems. In Auer, M. (ed.): International Conference Interactive Computer Aided Learning 2007, ePortfolio and Quality in e-Learning. CD. Kassel: Kassel University Press.
Musa et al., 2015 – Musa S., Ziatdinov, R., Sozcu, O. F. and Griffiths, C. (2015). Developing Educational Computer Animation Based on Human Personality Types. European Journal of Contemporary Education, Vol. 11, Issue 1, pp. 52-71.
Nagyová, 2015 – Nagyová, I. (2015). Analysis of Students’ Behaviour in eLearning Course “Educational Technologies”. European Conference on e-Learning. pp. 428-434. Hatfield: ACPI.
Polčin et al., 2016 – Polčin, D., Petrušková, H. and Stando, J. (2016). Support and Improvement of the Educational Process in Regional Education in Slovakia Through Tablet Classrooms. In The Third International Conference on Computer Science, Computer Engineering, and Education Technologies. pp. 71-78. Łodz: Łodz University of Technology.
ROBOTC – ROBOTC a C Programming Language for Robotics. Retrieved from http://www.robotc.net/
Robotika – URL: http://www.robotika.sk/mains.php
Saleiro et al., 2013 – Saleiro, M., Carmo, B., Rodrigues, J.M.F. and Buf, J. M. H. (2013). A Low-Cost Classroom Oriented Educational Robotics System. In Social Robotics: 5th International Conference, ICSR 2013. LNAI 8329. pp. 74-83.
Šnajder, Guniš, 2016 – Šnajder, Ľ. and Guniš, J. (2016). Analysis of results in inquiry based informatics education of selected topics. Information and Communication Technology in Education 2016. pp. 169-180. Ostrava: University of Ostrava.
Velšic, 2013 – Velšic, M. (2013). Digitálna gramotnosť optikou mladej generácie. [Digital literacy view of the young generation]. Bratislava: IVO – Microsoft.
Velšic, Janotík, 2016 – Velšic, M. and Janotík, T. (2016). E-skills a trh práce na Slovensku. [E-skills and job market in Slovakia]. Bratislava: IVO.


